По просьбе подписчиков обсудим пилотирование в MECHANICAL BACKUP MODE.
Согласно философии Airbus MECHANICAL BACKUP MODE не является режимом, предназначенным для выполнения посадки. Главной его задачей является обеспечение безопасного полёта воздушного судна в случае полного отказа электрооборудования, отказа обоих рулей высоты, отказа всех элеронов и спойлеров или отказа компьютеров, обеспечивающих работу FBW.
На мой взгляд, полёты в MECHANICAL BACKUP MODE - полезная практика, которая развивает навыки пилотирования, не характерные для обычных режимов. Дело в том, что в отсутствие основных органов управления, либо рулевых поверхностей, контроль над воздушным судном осуществляется с помощью руля направления, стабилизатора и РУДов. В данном режиме наиболее явно проявляются характеристики устойчивости и управляемости самолета, поэтому полёт в MECHANICAL BACKUP MODE - весьма ценный опыт для любого пилота.
Конструкция Airbus и особенности работы режима
Что если самолёт с FBW полностью потерял электропитание? Генераторы неисправны, батареи разряжены. Для включения RAT требуется 8 секунд. Каким образом сохраняется управляемость самолётом в это время?
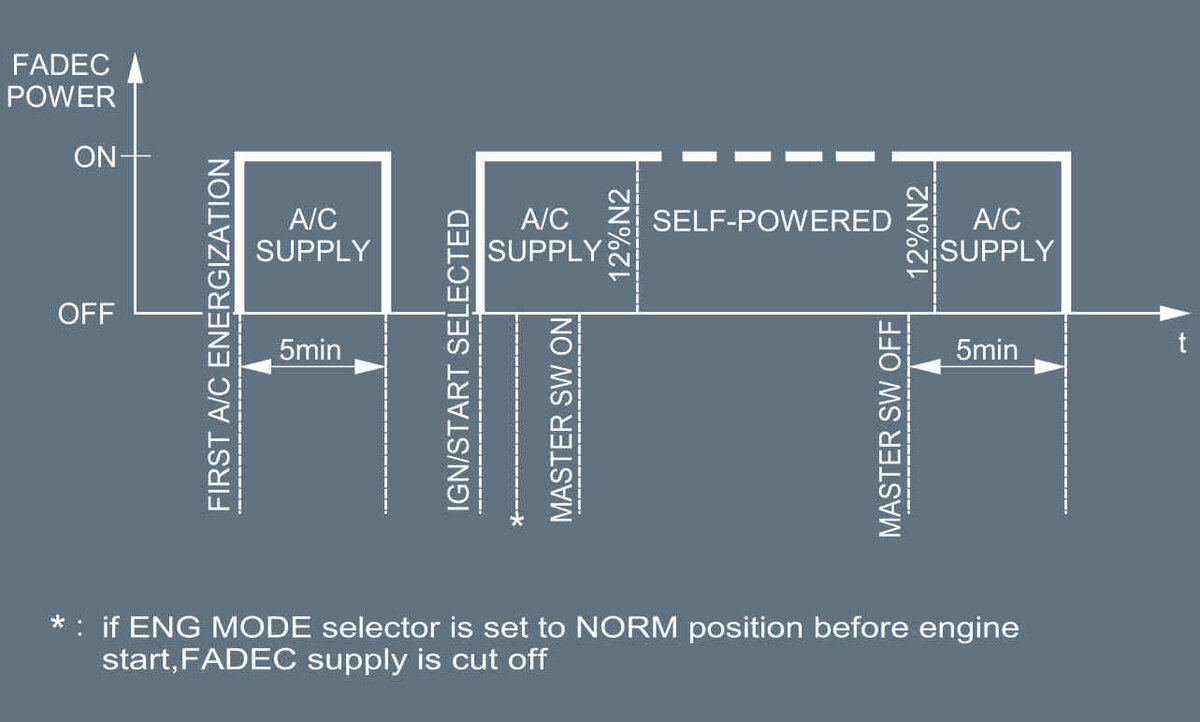
По достижению оборотов N2 в 12% FADEC двигателей переключается с бортовой цепи на внутренний источник электропитания. В течение всего полёта силовые установки самолета являются полностью независимыми, сохраняют работоспособность и управляемость даже при полной потере электричества.
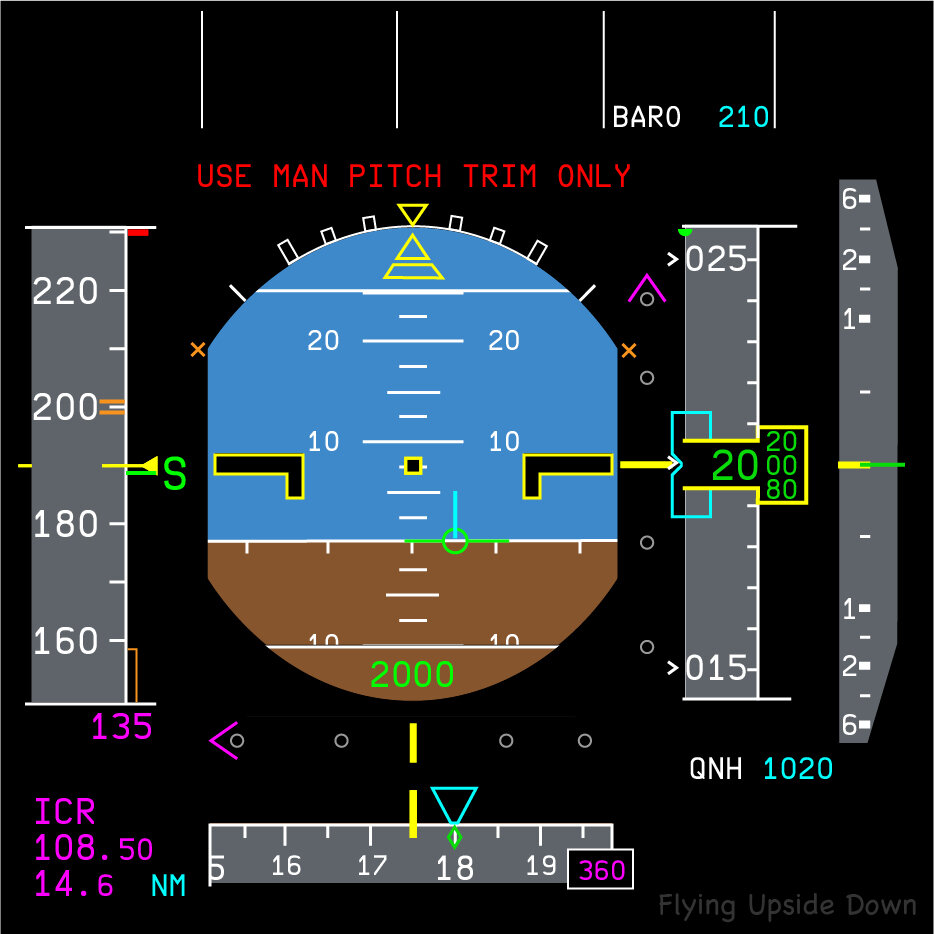
До включения в работу RAT и в течение нескольких десятков секунд после появления электропитания индикация на DU (дисплеях) будет отсутствовать. Кроме этого, для восстановления работоспособности компьютеров FBW потребуется время, в течение которого воздушное судно должно сохранять управляемость. С целью обеспечения работы базовых элементов системы управления Airbus имеет механическую связь педалей с бустерами руля направления и механическую связь триммера тангажа с бустерами стабилизатора.
Таким образом, даже в самых невероятных условиях самолёт сохраняет управляемость и позволяет пилоту контролировать траекторию полёта во время перезагрузки бортовых компьютеров.
Теория и практика
Руля направления, стабилизатора и двигателей, при грамотном пилотировании, вполне хватает не только для сохранения устойчивой траектории полёта, но и для захода на посадку. Если пилот четко понимает характеристики устойчивости и управляемости воздушного судна, режим MECHANICAL BACKUP обычно не вызывает никаких сложностей.
За счёт боковой динамической устойчивости руль направления является прекрасным средством управления самолётом в поперечном отношении. При создании скольжения эффективная стреловидность у опережающего полукрыла уменьшается, в то время как у отстающего - увеличивается. Это приводит к изменению коэффициента Су(а), характеризующего угол наклона линии в графике коэффициента подъёмной силы. На опережающем полукрыле подъёмная сила при постоянном угле атаки растёт, на отстающем - падает, что приводит к появлению поперечного момента в направлении отстающего полукрыла.
Для описания динамики развития угла крена при появлении угла скольжения при рассмотрении динамической поперечной устойчивости используется число каппа (к). Поскольку стреловидность крыла Airbus A320 по передней кромке составляет всего 25 градусов, число каппа (к) в нормальном диапазоне высот и скоростей не достигает больших значений, что позволяет комфортно контролировать изменение угла крена отклонением педалей.
Поскольку при появлении крена составляющая подъёмной силы уменьшается, для сохранения высоты, пропорционально отклонению педалей, необходимо создать небольшой кабрирующий момент (угловое вращение). Для этого могут использоваться как двигатели, так и стабилизатор, в зависимости от обстоятельств. Если в процессе ввода ВС в разворот произошла потеря скорости, целесообразнее первоначально добавить обороты, а в дальнейшем незначительно изменить положение стабилизатора. В случае, если скорость остаётся заданной, угловое вращение должно создаваться стабилизатором, обороты двигателя, ввиду небольшого крена, меняются незначительно.
Логичным будет вопрос почему для создания кабрирующего момента первоначально могут использоваться двигатели. Дело в том, что при падении скорости увеличение оборотов приведёт как к увеличению скорости, так и появлению положительного продольного момента. По достижению заданного режима пилоту останется лишь незначительно изменить положение стабилизатора для балансировки самолета. В обратном случае балансировку придётся выполнять дважды: перед увеличением скорости и после достижения желаемого режима.
Итак, резюмируем для крена. Для выполнения координированного разворота плавно отклоняем педаль и удерживаем ее в желаемом положении. Крен необходимо создавать плавно, достаточно перемещения педали на 2-3 сантиметра. При необходимости незначительно увеличиваем обороты и соразмерно увеличению крена создаём угловое вращение с помощью аккуратного отклонения стабилизатора на кабрирование.
При увеличении или уменьшении оборотов, ввиду нахождения двигателей ниже центра масс самолета, пилот должен использовать стабилизатор для компенсации изменяющегося продольного момента. Ввиду того, что большие изменения режима работы двигателей ведут к большим изменениям продольного момента, РУДами необходимо пользоваться аккуратно. В горизонтальном полёте уменьшение оборотов необходимо компенсировать соразмерным отклонением стабилизатора на кабрирование и наоборот.
При снижении, после уменьшения режима работы двигателей, стабилизатор необходимо отклонять на «пикирование», добиваясь снижения с заданной приборной скоростью. Для набора высоты действия обратные. Важно отметить то, что все эволюции ВС и операции с двигателями должны быть плавными и последовательными: изменение оборотов - изменение положения стабилизатора. Желательно не совмещать снижение с уменьшением скорости, дабы облегчить себе задачу балансировки самолета.
Выпуск механизации я предпочитаю выполнять в горизонтальном полёте после стабилизации самолета на желаемой скорости. Это позволяет ограничиться решением одной лишь задачи балансировки, что значительно облегчает работу пилота при заходе на посадку в MECHANICAL BACKUP MODE.
Наиболее сложными этапами изменения конфигурации ВС являются выпуск механизации в положение «2» и выпуск шасси. В первом случае происходит значительное изменение картины обтекания крыла, что требует активных действий со стороны пилота. При выпуске шасси, в свою очередь, существенно увеличиваются обороты двигателей, что также влечёт за собой перебалансировку самолета. По этой причине я предпочитаю устанавливать конфигурацию «2», выдерживать скорость около 160 узлов до входа в глиссаду, лишь после чего приступать к выпуску шасси с одновременным гашением скорости до расчётной. Заход на посадку осуществляется в конфигурации «3».
Резюмируем для управления самолётом в продольном канале. Изменение высоты целесообразно выполнять на расчётной скорости. Увеличение (уменьшение) оборотов необходимо выполнять плавно, компенсируя появляющийся момент отклонением стабилизатора. Управление траекторией воздушного судна осуществляется отклонением стабилизатора на расчетной скорости набора высоты (снижения). Выпуск механизации предпочтительно выполнять в горизонтальном прямолинейном полёте.
Как выравнивать воздушное судно в процессе выполнения посадки?
Поскольку управление воздушным в продольном канале осуществляется стабилизатором, одновременно изменять тягу и положение стабилизатора чрезвычайно тяжело (одной руки просто недостаточно). По этой причине важно четко понимать что происходит с самолетом и чего пилот добивается в процессе посадки.
Первоначальной задачей является стабилизация траектории снижения на расчетной вертикальной скорости. С учетом полета в конфигурации 3, вертикальная скорость должна составлять не более 800 футов в минуту, это позволит выполнить безопасную посадку даже без выравнивания.
Техника выполнения выравнивания может быть разной, я постараюсь объяснить оба способа.
Первый. Обороты уменьшаются до начала выравнивания.
По достижению высоты 30-40 футов пилот устанавливает малый газ, что приводит к уменьшению положительного продольного момента от двигателей. Как следствие - уменьшение тангажа с ростом вертикальной скорости, которое без задержки необходимо парировать отклонением стабилизатора на кабрирование.
Здесь стоит обратить ваше внимание на некоторые особенности управления. В отличие от руля высоты, стабилизатор при отклонении остается в заданном положении. При чрезмерных управляющих воздействиях пилота на триммер тангажа довольно легко создать условия для повторного отделения, что практически исключит возможность благополучной посадки. По этой причине действия пилотирующего должны быть четкие и координированные, что не всегда возможно.
В качестве достоинства данного метода можно отметить то, что пилот после установки малого газа не отвлекается на управление тягой. Его рука непрерывно лежит на триммере тангажа до посадки. Внимание пилота сконцентрировано только на выравнивании самолета соразмерно приближению к земле. По большому счету данный способ уместен для пилотов, уверенно пилотирующих самолет и имеющих достаточно хорошие навыки. По этой причине при обучении я предпочитаю второй способ посадки самолета в MECHANICAL BACKUP MODE.
Второй. Обороты уменьшаются после начала выравнивания.
По достижению высоты 30-40 футов пилот начинает выравнивание с уменьшением вертикальной скорости до минимальной. По завершению маневра обороты двигателей плавно уменьшаются до малого газа, то приводит к уменьшению кабрирующего момента и незначительному увеличению вертикальной скорости. Поскольку выравнивание, при нормальном темпе, завершается на высоте 1-3 метров, самолет не успевает набрать большую вертикальную скорость. С другой стороны, при желании у пилота остается достаточно времени для незначительного отклонения стабилизатора на кабрирование с целью контроля траектории снижения.
На мой взгляд, данный способ намного проще и безопаснее первого, поскольку управление воздушным судном в продольном канале фактически осуществляется посредством двух средств: двигателей и стабилизатора. Это дает некоторую свободу действий и упрощает исправление отклонений.
Итог
По большому счету, пилотирование в режиме MECHANICAL BACKUP MODE является факультативным упражнением для пилотов. Я не припомню случая, когда Airbus в реальном полете попадал в ситуацию, в которой пригодились бы данные навыки. Тем не менее, пилотирование в данном режиме дает представление о характеристиках устойчивости и управляемости самолета. Кроме того, у пилотов появляется понимание того, что самолетом вполне эффективно можно управлять не только с помощью сайдстика, но и с помощью других рулевых поверхностей. В данной статье мы не разбирали способ создания крена с помощью различия тяги двигателей, но по правде вам скажу, что и руль направления на Airbus не особо нужен.
Полеты в MECHANICAL BACKUP MODE полезны тем, что развивают у пилота навыки, которые он никогда не применяет в нормальной ситуации. Это значительно улучшает технику пилотирования и распределение внимания, что положительно влияет на безопасность полетов в целом. К сожалению, ни в России, ни в Китае, полеты в MECHANICAL BACKUP MODE практически не практикуют и научить пилотов в нем летать задачи ни у кого нет.
Безопасных вам полетов и спасибо за внимание!
Наш канал в Telegram: FLYING UPSIDE DOWN